Compound SemiconductorJEL

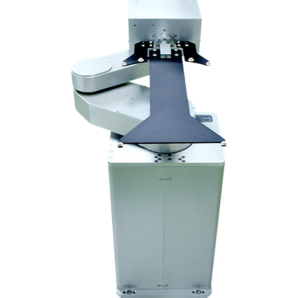
1. 無塵室用多軸結構設計,4軸水平多關節機械手臂。
2. 具備450mm晶圓翻轉功能,邊握式Chuck。
3. 高強度手臂/手臂第3關節部分可承受4kgf 以下(包含Chuck,晶圓的重量)
4. 具備晶圓翻轉機構的邊握式Chuck,可訂製同時搬運5片300mm晶圓的Chuck
5. 機械手臂驅動部分採用AC伺服馬達
6. 採用S曲線加減速控制以及對運轉軌跡的最佳化調整,實現高速,高精度地完成晶圓傳輸。
7. 根據設備的配置可以選擇底座固定方式,或法蘭(頸部)固定方式
8. 可選購伯努利方式Chuck(Option)
9. 電源:單相 AC200V±10% 10A 真空:-53kPa以上
10.控制通訊方式:串列RS232C或並列光學I/O